李峻翔 Junxiang Li副研究员(Associate Professor) 国防科技大学智能科学学院(National University of Defense Technology, NUDT) Email: lijunxiang@nudt.edu.cn, enginelee@yeah.net 
|

|
个人基本信息 |
||||||||
学术任职
|
||||||||
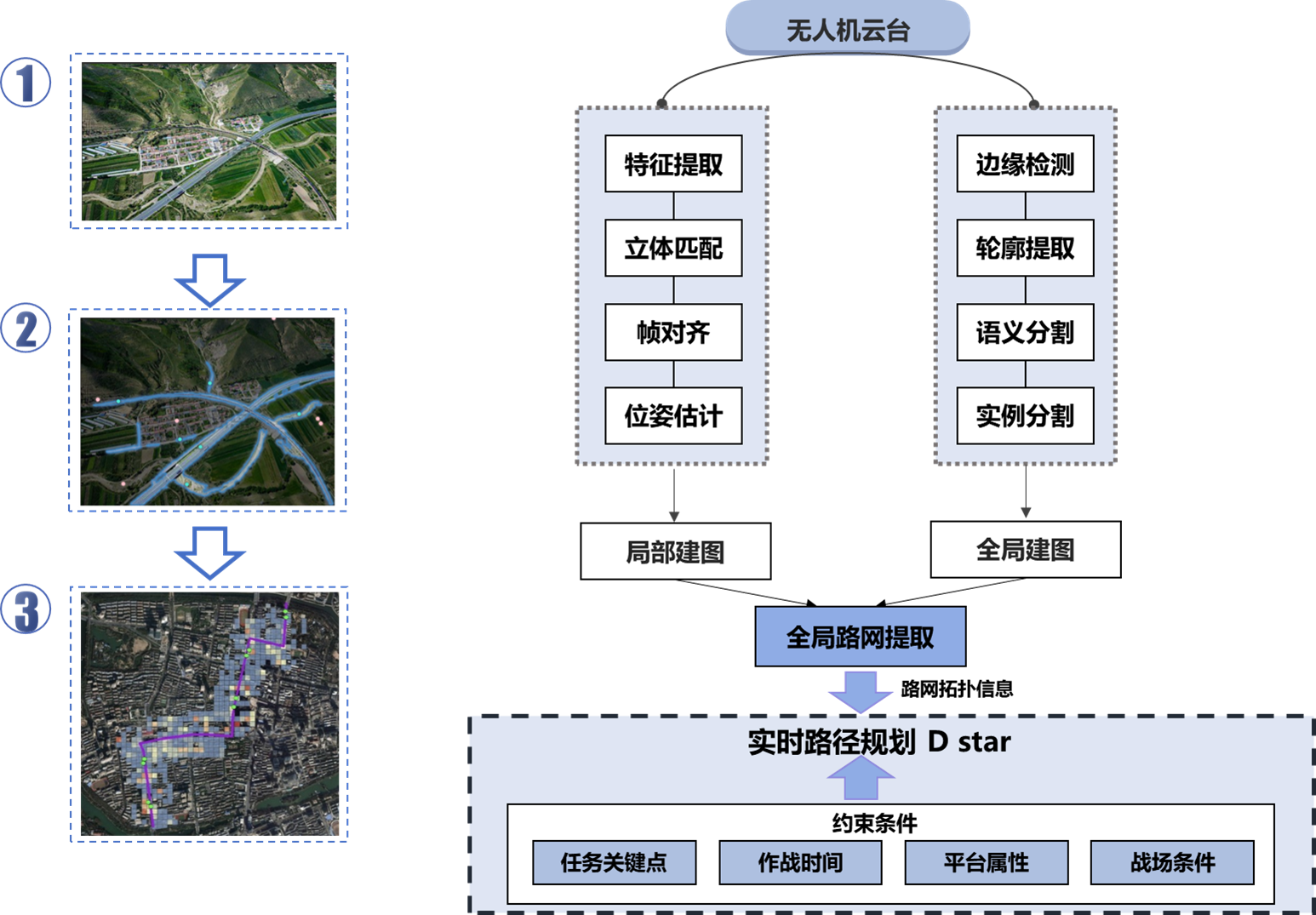
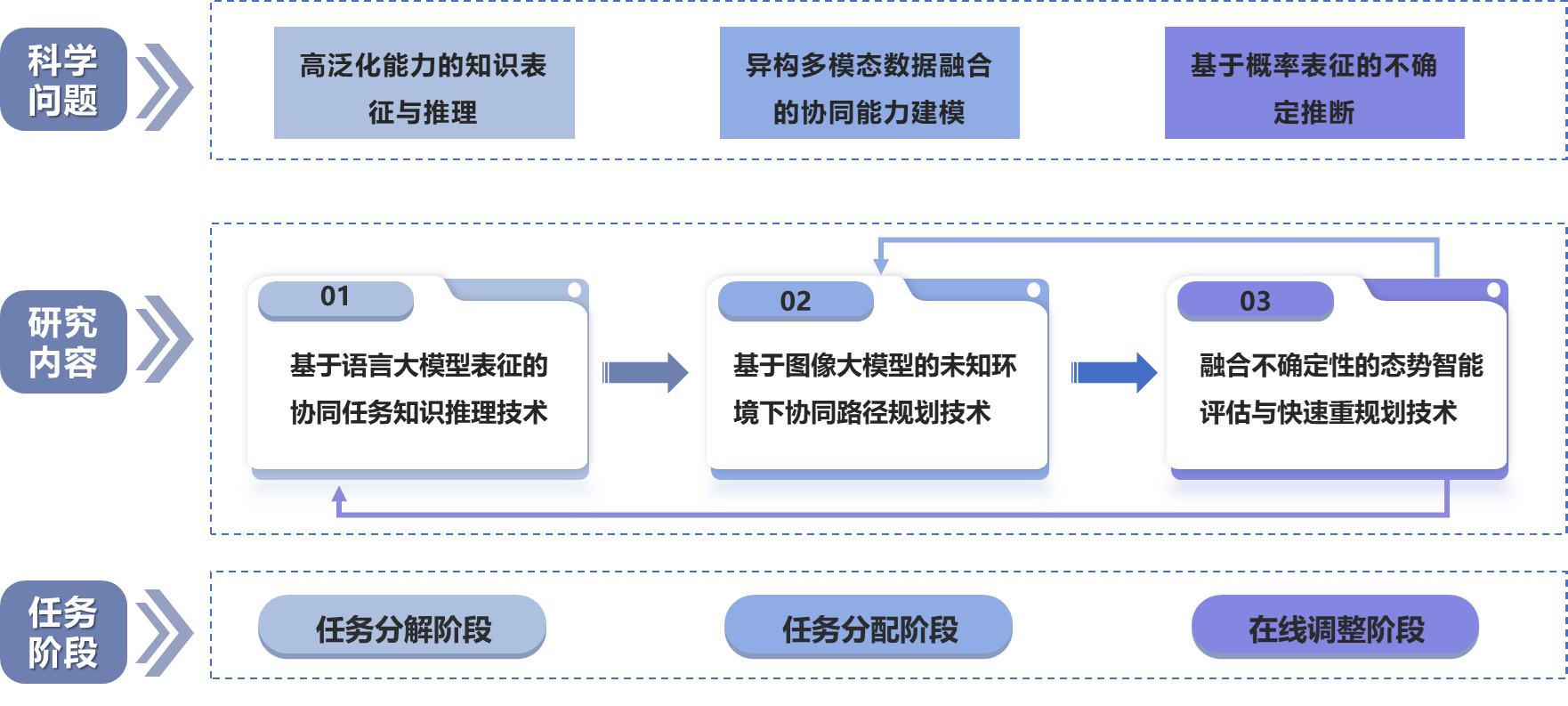
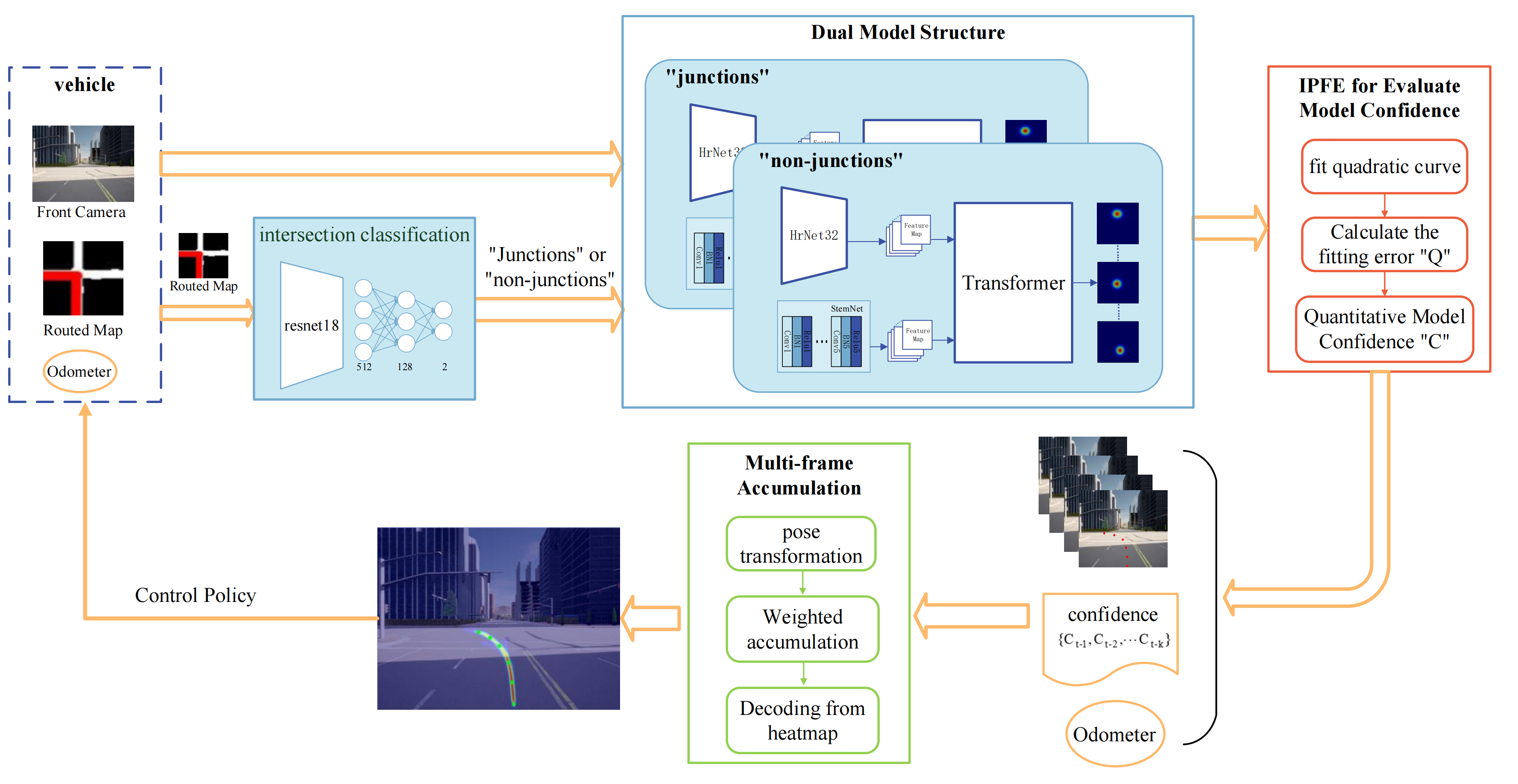
团队简介PLUS Team——Planning Linked Unmanned System价值观:谋胜·自主·协作 研究方向: 智能无人系统正成为全球新质生产力、军事领域竞争的战略高地。 本团队针对军事场景下空地异构无人系统协同决策与自主规划的核心难题,聚焦以下前沿方向,致力于让无人系统鲁棒、高效、可信赖工作。
|
||||||||
代表论文 详见[ResearchGate]共发表学术论文 30 余篇,包括IEEE Trans. ITS、IEEE Trans. VT、RAL、Information Sciences、Remote Sensing、IJRA、机器人/智能交通顶会ICRA、IROS、ITSC等。论文得到Yaochu Jin教授(长江特聘教授,欧洲科学院院士,IEEE Fellow),Serge Hoogendoorn教授(荷兰代尔夫特理工杰出教授),美国德克萨斯州大学奥斯汀分校Junmin Wang教授(SAE/ASME/AAIA/IEEE Fellow,ASME Charles Stark Draper 创新实践奖获得者)等专家的肯定和引用。 以下是代表论文: († indicates equal contribution, and * indicates corresponding authorship) |
||||||||
科研项目与影响近5年,多次参与我军无人系统重大活动,主要负责地面无人平台自主规划系统。此外,[1] 主持完成军委科技委173技术基金(重点项目)、××预研项目、国家自然科学基金青年基金等科研项目 7 项,作为骨干参与军委科技委173重大项目、国家自然科学基金区域联合基金等国家、军队重点项目20余项。 [2] 申请专利/软著 14 项(授权 10 项),获批湖南省科技成果转换1项。 [3] 参加“××2023”陆上无人系统挑战赛A1组比赛获第二名,在国家自然科学基金委员会举办“中国智能车未来挑战赛”获第三名。 |
||||||||
教学与人才培养成果[1] 担任无人系统课程群教学团队二类岗教员,主讲《图像处理与理解》、《数字图像处理》等课程,始终秉持 “以研促教、有趣有料” 的风格,凭借精彩的课堂呈现与扎实的教学内容,赢得专家与学员的一致赞誉,校级与院级教学评价均为优秀。在2024年春季校教学能手比赛中获一等奖(决赛第一名),2025年获教学创新大赛校三等奖。[2] 课程建设成果方面,主讲课程中1门被评为全军精品在线教育课程,1门被评为校级精品课程,1门评为校级精品在线教育微课;获得校教学成果奖二等奖1项(排名第 8)。同时积极开展教学研究,参与湖南省本科教改课题1项(排名第3),主持完成校级本科教学教改课题1项。 [3] 在人才培养方面,指导国家级大学生创新项目 1 项、省级大学生创新项目 3 项(其中 2 项在研,1 项优秀结题)。协助指导 3 名博士研究生(含本团队直博),指导 6 名硕士研究生(2人已顺利毕业)。全程指导9名本科生(4 人已毕业,3 人成功保研),1人本科毕业设计答辩优秀。担任学校“高地快车”俱乐部指导老师,指导学生参与全国大学生智能车竞赛、大学生工程创新大赛等高水平赛事,荣获全国一等奖1项、全国二等奖1项,被评为第二十届全国大学生智能车竞赛全国优秀指导老师(2025年)。 [4] 此外,积极投身专业与学科建设工作,深度参与国防科技大学未来技术学院(省级)的组建工作。 |
||||||||
招生信息每年有若干“菁英生源计划”读研指标及普通保研指标,欢迎对研究方向感兴趣的同学加入团队,意向读研同学请在大三下学期(第二季度)结束前邮箱联系 (需附前2.5年专业排名+学术成果/获奖证书)。此外,对意向读研同学的一点要求: |
||||||||
我能为你提供什么?除了国防科技大学提供的所有科研、学习、生活条件外,我还能为你提供以下方面的支持:
|
||||||||
|
© Junxiang Li | Last updated: Sep 16 2025 |